基于工业PC的分布式机房温控系统
韦小明
(国家新闻出版广电总局654台)
【摘要】 本文针对短波发射机房温度自动化控制的需要,介绍了一种分布式机房温度监控系统的设计与实现过程。该系统采用分布式工业采集模块与实时多任务操作系统相结合,通过智能PID算法控制,对发射机温度进行实时监测和智能化决策调节,为发射机的工作提供最优化的工作环境。【关键字】分布式控制;发射机;PID 算法;温度监控1、引言
冷却系统是商用发射机的一个重要组成部分,为大功率发射机的稳定运行提供着基础保障。在日常工作中,值班员通过手动调节冷却系统进出风电机的开关、进出风百叶窗的大小来控制发射机温度的高低。这种工作模式下,因每个机房都有多部发射机,存在监测和控制点分散,值班员劳动强度大,容易因人为疏忽造成发射机故障的问题。因此合理的进行发射机房温度自动控制改造,实现温度自动实时控制,最大程度的降低人工操作,减少人为因素造成的发射机故障就显得十分的必要。传统温度自动控制系统中,传感器与计算机接口的连接是通过若干条导线连接。当传感器数量较多时,系统的接线会非常多,导线往往不易铺设。信号线的长距离传输时,相互容易产生干扰,尤其是在大功率短波发射机房中,模拟信号受电磁干扰较为严重,取样信号无法正确反映现场实际情况,使得温度自动控制系统无法正常工作。本文介绍的分布式机房温度监控系统,将采集和控制模块安装在离现场采集点很近的地方,将控制主机安放在控制室,采用RS485工业总线标准进行长距离数据通信,较好的解决了的问题。通过一台主控计算机实现了机房所有发射机温度的实时采集、处理、显示和温度的调控。从改造后的使用情况来看,效果良好,达到了改造的目的。2、系统介绍
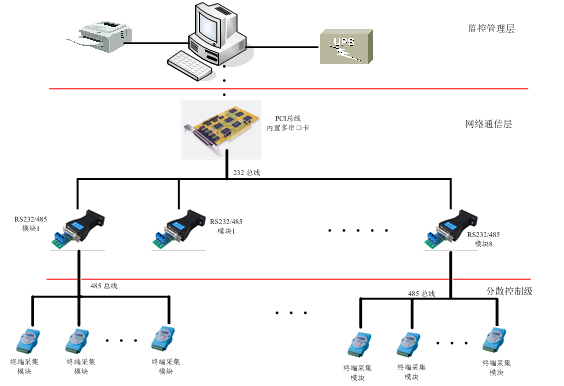
分布式控制系统(Distributed Control System,DCS)把工业生产体系分为控制现场和控制中心两个部分,通过专用的网络把它们连接起来,一个控制中心可以远程、实时地监控分布在多个控制现场的设备,形成一个分布式的自动控制体系。DCS的网络物理拓扑结构主要分为树型、星型、环型、总线型和复合型等五种。本系统采用“树型”结构,网络拓扑结构如图1所示。图1:系统网络结构图
计算机网络通讯系统分为3级,上位机采用工业控制计算机,运行智能温度监控软件构成监控管理层;采用台湾研华ADAM(亚当)工业采集控制模块,采集进出风电机、百叶窗等设备的行程开关状态,通过输出控制参数调控风机、水泵等设备的启动和停止,构成分散控制层;由RS232/485转换模块和插在控制计算机中的PCI多串口卡组成网络通信层。整个系统就像一棵倒置的树,顶端有一个带分支的根,每个分支还可延伸出子分支。所有节点都通过一条链路连接到中央节点上。系统的通信采用RS-485总线模式,所有的采样、控制模块都接在网络中,为了避免数据冲突,对所有的模块进行编地址,控制中心给各模块发出指令时,命令字中都带上地址信息,以决定哪个模块接受命令并进行相应在操作。3、系统设计
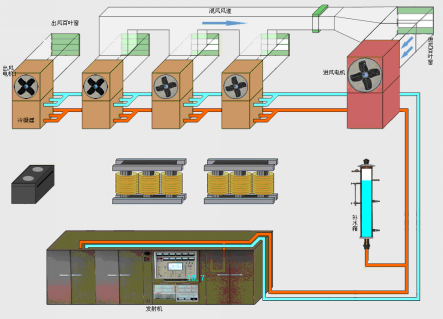
3.1、发射机冷却系统组成发射机的冷却系统由一个总进风电机和进风百叶窗、四个出风电机和百叶窗、四个冷凝器、两个主备水泵以及循环水路构成。其布局如图2所示:图2:冷却系统布局图
图2中黄色水管代表循环的热水,蓝色水管代表循环的冷水。冷却水泵负责全机水路的循环,将发射机流出的热水送入4个冷凝器进行冷却后将冷水送回发射机,出风电机负责对冷凝器进行散热吹风,并通过出风百叶窗将热空气送至室外。进风百叶窗和进风电机负责将机房外部冷空气吸入冷凝室,3.2、分散控制层本文以一部发射机冷却系统为例,给除需要采集的模拟量、状态量以及进行温度调节所需控制输出的开关量统计,如表1所示。表1:一部发射机控制参数统计表
| 控制量名称 | 数量 | 属性 |
| 发射机出水温度 | 1 | 模拟量 |
| 冷凝器总进水温度 | 1 | 模拟量 |
| 冷凝器出水温度 | 4 | 模拟量 |
| 发射机补水箱水位 | 1 | 模拟量 |
| 主备水泵启/停状态 | 2 | 开关量 |
| 进风电机启/停状态 | 2 | 开关量 |
| 出风电机启/停状态 | 8 | 开关量 |
| 出风百叶窗位置 | 10 | 开关量 |
| 主备水泵启/停控制 | 2 | 开关量 |
| 进风电机启/停控制 | 2 | 开关量 |
| 出风电机启/停控制 | 8 | 开关量 |
| 出风百叶窗启/停控制 | 8 | 开关量 |
| 发射机补水箱水位控制 | 2 | 开关量 |
4、软件设计
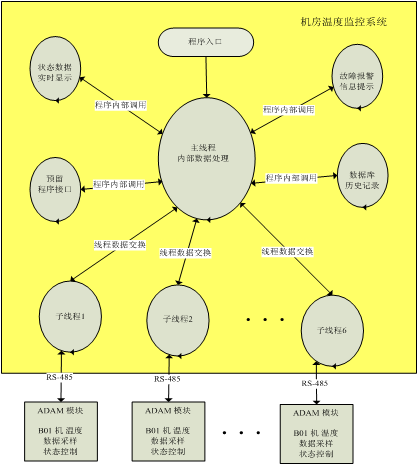
4.1、软件架构设计根据发射机房业务的特点,以及对温控系统的需求分析,要满足温度控制的实时性,以及一台计算机同时控制多部发射机冷却系统的要求,编程环境采用C# 2005,温度监控系统采用多线程技术,并发运行。采用WINDOWS XP和ACCESS 2003数据库作为机房温度监控系统的运行平台。以下就发射机房六部发射机为例,介绍监控系统软件架构如图3所示:图3:监控系统软件架构图
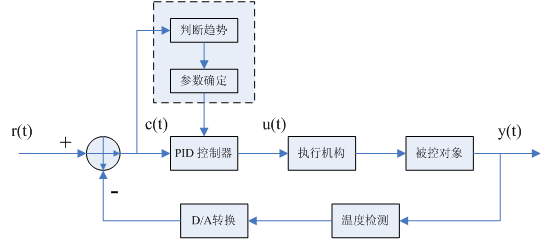
主线程负责数据的显示、历史记录查询、故障报警以及信息提示功能。而子线程负责完成与ADAM模块通信、数据提取、数据分析、PID温度控制的功能。考虑到系统实时性的要求,用六个子线程分别对应六部发射机的温度控制。子线程通过RS485通信协议与现场的ADAM采集控制模块进行数据交换,发送控制指令进行温度控制,实现方案如下:(1)、温度传感器将发射机温度、补水水箱液位等模拟量通过ADAM-4017模块传送到计算机。(2)、ADAM-4051模块将冷却系统的进出风电机、百叶窗等开关量传送至计算机。(3)、计算机根据传回的模拟量和开关量,精确掌握了发射机冷却系统的实时状态,根据用户设定的温度调整范围与发射机温度进行比较,利用智能PID算法控制输出对风机、百叶窗的控制,以实现对发射机温度的调整。(4)、计算机根据用户设定的补水水箱液位范围进行判断,智能输出补水电机启动/停止的控制指令。(5)、计算机对进出风电机和百叶窗的开通顺序为,进风百叶窗→进风电机→出风1、2百叶窗→出风1、2电机→出风3、4百叶窗→出风3、4电机。关闭顺序则相反。4.2、PID闭环控制PID(比例:proportion、积分:integration、微分:differentiation)控制器(简称PID控制),作为最早实用化的控制器,已有近百年历史。现在仍然是是控制系统中应用的最广泛一种控制规律。通过大量的实际运行经验以及理论的分析都可以证明表明,运用PID控制算法对许多工业过程进行控制,都可以得到令人满意的效果。因此本文也采用了PID控制技术来实现机房温度的实时控制。在模拟控制系统中, 最常用的PID控制规律为:式中:KP为比例系数,u(t)是被控对象的输入,即PID控制器的输出;e(t)是偏差信号,为PID控制器的输入。控制器将偏差信号e(t)的比例、积分、微分进行线性组合,从而构成控制量对被控对象进行控制。由于计算机处理的是数字量,实现的是离散控制,要实现PID控制规律必须用数值逼近的方法来进行。并且发射机的温度控制具有时变性、滞后性、非线性等特点,如果仅仅采用常规的PID算法,则不能满足发射机实时温度的控制要求。因此我们设计了一种智能PID增量控制算法,对温度的变化值进行趋势判断,再根据判断结果分段进行调节。其系统的框图如图4所示:图4:PID结构示意图
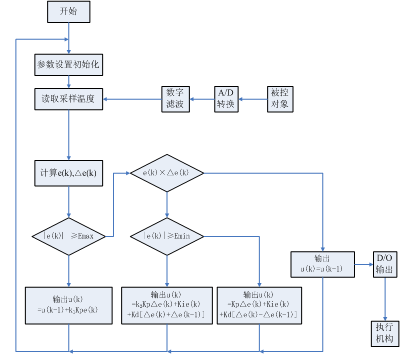
图中,r(t)是温度的设定值,y(t)是被控的对象。将模拟信号做离散化处理,将(1)中的积分项和微分项分别改写成差分方程:在式(2)和式(3)中,t=kT,其中T为采样的周期,k为采样的序号,k=0,1,2,…,e(k-1)和e(k)为 (k-1)次和k次所采样的偏差信号。将式(2)和式(3)代入式(1)得到离散的 PID 表达式(4)在式(4)中,u(k)是第k时刻的控制量,我们用第k时刻的控制量去减第(k-1)时刻的控制量,则可得出控制量增量△u(k):用△e(k)替换e(k)-e(k-1),用△e(k-1)替换e(k-1)-e(k-2) 得到简化的增量式:在式中,△u(k)是第k次采样的控制器输出增量,△e(k)是第k次采样输入温度变化值的增量,△e(k-1) 是第(k-1)次采样时输入温度变化值的增量,其中Kp 、Ki、Kd分别是比例参数、积分参数、微分参数。通过简化增量式(6)可知,PID控制器输出的是增量,误动作的时候对输出的影响比较小。该算法不需要对误差进行依次累加,输出的控制增量△u(k)仅与最近的 k、k-1、k-2 次的采样值相关,所以通过加权处理能够比较容易的获得较好的控制效果。4.3、PID智能分段控制流程智能PID控制算法的软件流程如图5所示。设定两个温度的参考值Emax(温度最大变化值)和Emin (温度最小变化值),作为趋势判断的参考,通过下列三种情况输出判断:(1)、当|e(k)︳≥Emax时,则说明发射机的温度变化绝对值很大,此时无论温度变化趋势怎么样,PID控制器都将按最大或最小进行输出,从而保证温度迅速调整到设定值范围内,此时输出为:u(k)=u(k-1)+k1Kpe(k) (其中k1>0)
(2)、当e(k)×△e(k)>0时,表明发射机的温度变化有增大的趋势,那么此时:如果|e(k)|≥Emin,则说明温度变化的比较大,应该加强比例调节,让温度变化减小, 此时输出:u(k)=k2Kp△e(k)+Kie(k)+Kd[△e(k)+△e(k-1)]
如果|e(k)︳<Emin, 则说明尽管发射机的温度变化有增大的趋势,但其变化的范围并不大,可以实施一般控制,那么此时输出为: u(k)=Kp△e(k)+Kie(k)+Kd[△e(k)-△e(k-1)]
(3)、当e(k)×△e(k)<0, 或e(k)=0时, 则说明发射机的温度变化有减小的趋势, 或者温控系统已达到了平衡的状态, 那么此时输出为: u(k)=u(k-1)。图5: PID控制算法流程框图
5、项目运行评估
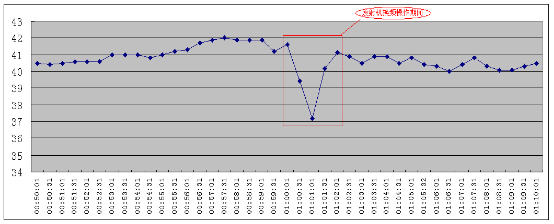
机房温度监控系统投入运行后,经历了夏季酷热和冬季严寒的考验,至今运行正常。图6绘制的是历史数据库中2014年3月1日00:50至01:10期间,发射机温度随时间变化的曲线。图6:发射机温度曲线
由图6可以看出温控系统在发射机正常播音工作期间,控制发射机温度在41℃附近变化,控制精度达到±1℃;在发射机进行换频、调谐工作时的升温和降温过程中,PID控制器可以控制发射机冷却系统根据发射机温度变化进行实时调整,使发射机温度迅速回到用户设定的区间范围内。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
-.png){kind=link}
-1.png){kind=link}
-1.png){kind=link}
-1.png){kind=link}
-1.png){kind=link}
{kind=link}
{kind=link}
评论 点击评论